第14章 热测试¶
3)胶水、高温胶带:如图 14-5 所示,用来固定测试点;

14.3.2 接触式测温¶
电子产品中接触式测温仪器最常用的是热电偶,如图 14-4 所示。热电偶的测温基于塞贝克效应,即当两种不同的金属组成回路时,两个节点间的温差会导致回路中产生电动势。这种由于温差导致的电动势称为热电动势。温差与热电动势之间存在一一对应的函数关系。因此,可以通过测量两点之间的电动势来换算结点间的温差。
热电偶测温的优点是直观、准确,误差一般在 \(\pm0.5^{\circ}C\) 以内,缺点如下:
使用热电偶进行测温的步骤如下:
说明:
1)热电偶需要使用导热性能好的黏结剂粘贴到测温点上,可以使用乐泰 384 导热胶 + 7452 催化剂,固化时间较长(常温下数小时才能进行下一步操作),但固化后比较牢固,推荐在需要反复测试的场景中采用;乐泰 416 胶水 + 7452 促进剂,可在数秒内凝固,缺点是较脆,高温下可能崩裂,可以在时间紧迫的一次性测试中使用。
14.3.3 非接触式测温¶
非接触式测温常用的仪器是热成像仪和红外点温枪,如图 14-6 所示。点温枪只能测得表面上特定点的温度,常用于现场问题定位,正规热测试验证时较少使用。热成像仪在终端产品(如手机、机顶盒、笔记本电脑等对设备表面温度有严格要求的设备)中经常使用。


1. 非接触测温的优缺点¶
非接触式测温的优点如下:
3)热成像仪还可以获得一整个面的温度分布,便于发现可能存在的不被注意的点。
非接触式测温的缺点如下:
2. 非接触式测温误差的影响因素¶
要正确使用红外摄像仪,首先需要理解其产生测量误差的因素,除了仪器本身的因素外,主要表现在以下几个方面 \(^{[1]}\) 。
(1)物体表面辐射率 辐射率是一个物体相对于黑体辐射能力大小的物理量,它除了与物体的材料形状、表面粗糙度、凹凸度等有关,还与测试的方向有关。当物体为光洁表面时,其方向性更为敏感。不同物质的辐射率是不同的,红外测温仪从物体上接收到辐射能量的大小正比于它的辐射率。根据基尔霍夫定理:物体表面的半球单色发射率 \(\varepsilon\) 等于它的半球单色吸收率 \(\alpha\) ,即 \(\varepsilon = \alpha\) 。在热平衡条件下,
物体辐射功率等于它的吸收功率,即吸收率 \(\alpha\) 、反射率 \(\rho\) 、透射率 \(\gamma\) 总和为 1 ,即 \(\alpha + \rho + \gamma = 1\) ,图 14-7 解释了上述规律。对于不透明(或具有一定厚度)物体,可将透射率 \(\gamma\) 近似视为 0 ,那么只有辐射和反射 \((\alpha + \rho = 1)\) 。物体的辐射率越高,反射率越小,背景和反射的影响越小,测试的准确性也就越高;反之,背景温度越高或反射率越高,对测试的影响就越大。如镜面表
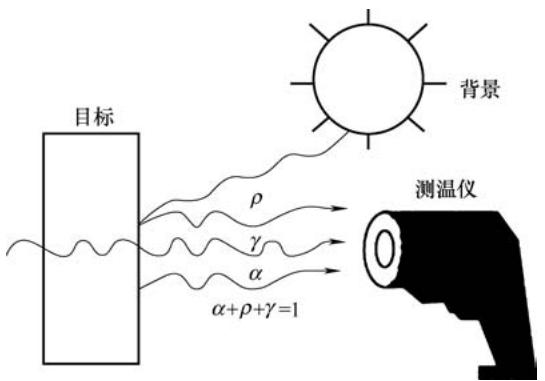
面,其反射率高,热成像仪接收到的能量可能不是其自身辐射的能量,而是反射的其他物体发出的辐射能,这就会造成测试结果失真。另外,在实际的检测过程中,必须尽可能将测温仪中设定的辐射率与被测表面的实际辐射率设置为相同,以减小所测温度的误差。当被测表面为镜面时(反射率较大),可以使用一些涂料将其涂黑,以降低反射率。
表 14-2 S 值应满足的要求
| 目标直径 D/mm | 15 | 50 | 100 | 200 |
| 测量距离 S/mm | <120 | <400 | <800 | <1600 |
(4)大气吸收 大气吸收是指在传输过程中使一部分红外线辐射能量变成其他形式的能量,或以另一种光谱分布。大气吸收程度随空气温湿度变化而变化,测量距离越长,大气透射对温度测量的影响就越大。所以,在室外进行红外测温时,应尽量在无雨、无雾、空气比较清晰的环境下进行;在室内进行红外测温时,应在没有水蒸气的环境下进行,这样就可以在误差最小的情况下测得较准确的数值。
3. 非接触式测温工程处理方法¶
对于室内环境中普通表面的温度测试,发射率是影响红外温度检测精度的重要参数之一,因各目标表面性质不尽相同,故发射率会有很大差别。若不能准确设置发射率,则会造成测量误差,下面讲述如何修正发射率,满足客户精确测量的需求。
辐射率的概念在 2.2.3 节有简单介绍。其影响因素如下:
大多数非金属材料(如塑料、油漆、皮革、纸张等)的发射率可设置为 0.95,相同材质、不同颜色的目标其发射率非常接近,误差通常不超过测量精度范围;部分表面光亮的非金属材料发射率较低(如瓷砖、玻璃等)。
当不知道测试表面的发射率时,通常采用如下方法来处理,以保证测试结果的准确性 \(^{[2]}\) :
(1)绝缘胶带法 将一块绝缘胶带(已知发射率)贴于被测物体表面,通过
调整红外热像仪发射率,使没有贴胶带表面的温度与贴有绝缘胶带表面温度相同或接近,此时的发射率即为被测材料物体正确的发射率。

1)操作方法:喷涂的丙烯酸树脂(建议使用保赐利自动喷漆,黑色),发射率为 0.97。
2)适用场合:此种方法可以适用于温度较高目标,也可以适用于目标尺寸较小,但可以接受被测物体表面状况被改变的场合,例如设备维护场合下的管道、阀门等静设备,或在制造业中,较小的芯片表面、引脚、不规则的散热片、电容
器顶端、LED 芯片(表面镀银)等。
3)注意事项:应尽量使喷漆面均匀,而且薄(但要覆盖住被测目标表面),同时要给客户说明,喷涂后的目标可能无法擦拭干净;建议使用者喷涂 3min 后再进行测试。
建议使用黑体漆,已知其发射率为 0.96,如图 14-9 所示。
(3)涂抹法 用水性白板笔(已知发射率)均匀地涂抹在被测物体表面,然后通过调整红外热像仪发射率,直到没有涂抹的表面温度与涂抹表面温度相同或接近,此时的发射率即为目标物体正确的发射率。
操作方法:涂抹水性白板笔(建议使用晨光水性白板笔,牌号 MG-2160,黑色),发射率:0.95,如图 14-10 所示。
适用场合:此方法可以适用于不允许改变物体表面状态(涂抹后可擦去),同时形状不适合进行胶带粘贴的目标,涂抹法可针对较小的目标进行,但目标表面温度不宜超过 \(100^{\circ}\) C。
注意事项:白板笔不能是油性笔,否则干后很难擦去。应尽量使涂抹面均匀,建议使用者涂抹 3min 后,待目标表面热平衡后再进行测试。

(4)接触温度计法 用接触式温度计,如热电偶、热电阻等直接测量物体表面温度,然后通过调整红外热像仪发射率,直到热像仪所测得的表面温度与接触式温度计测得的表面温度相同或接近,此时的发射率即为目标物体正确的发射率。
操作方法:使用接触式测温仪器。
适用场合:测量方便,但需注意现场是否允许进行表面接触测温(特别是带电、运动等现场)。
注意事项:应使热电偶、热电阻等与被测目标表面接触良好,并要求测试的数据必须是温度稳定后的数据。
14.4 热测试常用的设备仪器¶
相对而言,热测试是比较简单的测试。热测试实验室的建立可以参考表 14-3 所示设备仪器。
表 14-3 部分热测试常用设备仪器 \(^{[4\sim7]}\)
| 仪器/设备名称 | 仪器/设备功能 | 参考图片 | 推荐型号 |
| 数据采集仪 | 自动或人工采集热电偶温度、电流、电压数值 |  | Agilent34972 |
| 数据采集模块 | 连接热电偶线,将温度信号转化为电信号 |  | Agilent34901A |
| 钳流表或功率计 | 测试产品功耗,确定发热量 |  | 品类繁多,需要根据所测产品的工作电流电压来确定 |
| J/K/E/T型热电偶 | 连接测温位置和数据采集模块 |  | ΩmegaTT-K-30或TT-T-30 |
| 红外热像仪 | 粗略测量、拍摄、记录表面的温度分布 |  | Fluke Ti480 PRO或FLIRT 500系列 |
| 导热黏结胶 | 将热电偶线粘接到测温位置 |  | 乐泰 416 或乐泰 384 及 7452 催化剂 |
| 恒湿恒温箱 | 提供恒湿恒温环境,适合风冷、液冷等产品热测试 |  | 广州五所环境仪器有限公司恒温恒湿试验箱 |
| 自然无风恒温箱 | 提供无风的恒温环境,适合自然散热产品热测试 |  | 瑞领自然对流恒温恒湿腔室系列 |
| 风洞 | 测量风扇 PQ 线,测量系统风阻 |  | 瑞领风洞系列 |
| 激光转速计 | 测量风扇转速 |  | OMEGA HHT13 |
14.5 撰写热测试报告¶
测试报告是验证产品散热是否满足要求的关键文件,是电子产品应当归档保存的基础技术文档。测试报告应当简洁扼要,但记录清楚任何对测试结果有影响的因素,示意见表 14-4~表 14-6。不同公司、不同产品的热测试报告格式和形式各不相同,但需要记录和包含如下信息:
表 14-4 系统环境应用规格汇总示意表 \(^{[3]}\)
| 序号 | 指标项 | 规格 | 备注 |
| 1 | 工作温度范围 | 0~40°C | |
| 2 | 工作湿度范围 | RH5%~95% | |
| 3 | 壳体温升要求 | ≤20°C | |
| 4 | 进出风口温升要求 | ≤30°C | |
| 5 | 系统内部最高空气温度限制 | ≤85°C | |
| 6 | 噪声规格要求 | — | |
| 7 | 防护等级 | — | |
| 8 | 防尘要求 | — |
表 14-5 元器件热特性参数及温度规格整理示意表 \(^{[3]}\)
| 序号 | 元器件名称 | 功耗/W | 封装信息 | 数量/pcs | PCB位号 | 热阻/(°C/W) | 温度规格/°C | |||
| $R_{jc}$ | $R_{jb}$ | $T_j$ | $T_c$ | $T_a$ | ||||||
| 1 | CPU | |||||||||
| 2 | DDR | |||||||||
| 3 | PA | |||||||||
表 14-6 重要元器件热测试数据结果记录格式示意表 \(^{[3]}\)
| 器件名称 | 热耗/W | 数量/pcs | 结温规格/°C | 壳温规格/°C | 工况1 | 工况2 | 工况3 |
| CPU | |||||||
| DDR | |||||||
| 环境温度/°C | |||||||
| 整机输入功率/W | |||||||
| 壳体顶部温度/°C | |||||||
| 壳体侧面温度/°C | |||||||
| 壳体底部温度/°C | |||||||
| 进风平均温度/°C | |||||||
| 出风平均温度/°C | |||||||
| 进出风温升/°C | |||||||
| 散热能力换算/(W/°C) | |||||||
| 备注说明 | |||||||
14.6 本章小结¶
热测试不是简单的测试温度,对比要求,然后就结束,测试方案的制定和测试结果的分析对产品设计有极大的意义。许多情况下,产品设计方案需要结合测试结果来改正。测试本身也是设计的一部分,测试数据库的建立以及与仿真相配合的回归分析,对于提高公司整体热设计水平、建立数字孪生平台,甚至实现智能化设计有重要意义。
参考文献¶
第 15 章¶
热仿真软件的功能、原理和使用方法¶
15.1 热仿真的作用¶
电子产品散热仿真属于计算流体动力学(CFD)的一个分支,表示使用计算机软件构建电子产品的数值模型,通过数值计算和图像显示等方法,评估、分析电子产品的散热、噪声等表现。
热仿真可以视为是一种虚拟实验。它可以在不做出实际产品的前提下,通过输入一系列的信息数据来计算在不同运行场景下产品的散热风险。因此,热仿真能够提前预判产品的散热方案是否合理,从而节约研发时间和打样成本。当前,随着计算机性能的提升以及数值求解技术的不断完善,热仿真的精度和效率都在日渐提升。热仿真软件已成为热设计工作中最重要的辅助工具之一。热仿真能够实现的基本功能如下:
15.2 热仿真的基本原理¶
热仿真的本质是求解一系列根据流体力学和传热学的基本物理定律推导出的方程组。在求解时,软件首先将连续空间割裂成一个个小块,每一个小块相当于一个控制体(这个过程在仿真软件中就是生成网格的过程)。在一个控制体内,净流入的质量将导致物体密度的变化,而净流入的能量将导致物体温度的变化,即每个控制体都必须满足质量守恒定律和能量守恒定律。流速的变化是依据动量定理得出的,即物体在单位时间内某方向上动量的变化与它受到的冲量值相同。这几个定理,连同流体状态方程(流体的密度、导热系数、黏度、比热容等物理性质随温度、压强的变化关系式)和用户给定的边界条件,就是软件进行仿真计算的基本依据。
(1) 控制体内质量的增加率 = 流入质量速率 - 流出质量速率
由于控制体的体积并不变化(划分完网格后就固定不变了),因此质量的增加量只能用密度来体现。当将工质的密度视为不可变时,流入的质量就等于流出的质量,如图 15-1 所示。
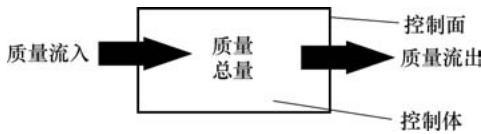
质量守恒定律用数学方程表示,则为
式中,左侧第一项即为由密度随时间变化引起的控制体内部质量的变化,后三项则是流体运动过程中,通过控制体各壁面流量的净和。
(2) 控制容积内动量的增加率 = 动量的流入 - 动量的流出 + 净力
数值模拟中求解的动量方程是根据动量定理推导出的,如图 15-2 所示。动量定理的内容是物体动量的增量等于它所受合外力的冲量,即 \(Ft = m \Delta v\) ,即所有外力的冲量的矢量和。控制体同样
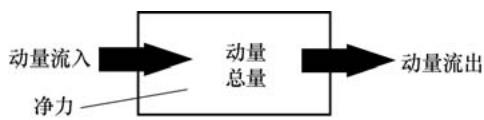
满足动量定理。实际流体在流动过程中可能受到多种类型的力,如地球引力导致的重力、流体微团热运动产生的压力、黏性导致的内摩擦力、电场导致的电场力和磁场导致的洛伦兹力等。其中重力、压力和内摩擦力是普遍存在的三种力,因此实际流体动量方程的数学方程形式非常复杂。理想流体忽略了流体黏性,其运动方程可以简化为式(15-2)
式中,第一项 \(f_{i}\) 表示 i 方向上控制体受到的质量力(与质量成正比的力,重力是典型的质量力)效应,第二项表示不同面上压强不同产生的外力效应,方程右侧则表示控制体内流体动量的变化率。
可以通过这个方程来理解在自然散热产品的仿真中为什么需要激活重力选项。自然散热中,流体运动的主要动力是重力,温度高的空气密度更低,于是受到的重力低于低温区域的空气。根据动量定理,重力将使得控制体内的空气沿重力方向的速度增加。这样,低温空气沿重力方向流动后,造成高压区,在压强的作用下,高温空气就呈现了上浮趋势。如果不激活重力,那么流体将无法流动,计算结果就没有参考价值了。
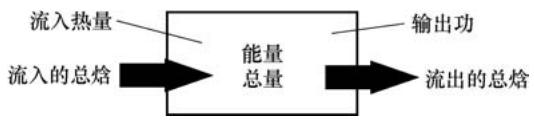
(3)内部能量变化率 \(=\) 流入热量 \(+\) 流入的总焓 - 输出功 - 流出的总焓
能量方程涉及能量形式的转换,如图 15-3 所示,除了需要考虑动量方程的力之外,还需要引入温度的变化、内摩擦生热以及热辐射的影响,因此更加复杂。式(15-3)是一个高度概要化的能量方程
式中,u,v,w 分别为 x,y,z 方向上的速度。左侧第一项表示控制体的内能随时间的变化,第二项表示控制体面上由于流体流动带来的能量效应;方程右侧第一项表示导热效应,第二项表示控制体内热源产热速率,第三项和第四项分别表示流体黏性内摩擦力产生的热量和其他因素(如辐射、化学反应等)效应。
在固体内部,无需考虑流动和黏性项,因此式(15-3)可简化为
在电子产品热仿真中,发热元器件一般是固体, \(\dot{\varphi}\) 值就表示了单位体积内发热元件产生的功耗。由此可见,产热速率值的准确性直接影响求解结果的精度。电子产品热仿真中,绝大多数都是关注设备达到稳定状态时的温度表现,这时,温度已不再随时间的变化而变化,因此式(15-4)左侧变为 0。在这些前提下,固体内部的温度方程中不再包含密度和比热容这两个物性参数,故可以不予赋值。而即便是稳态的情景,流体的温度方程中也会包含密度和比热项(流体流动项无法忽略),因此所有情景中流体的这两个物性参数都要设定。
计算之前,软件会先将整个产品的求解区域裂解成许多个控制体,控制体与相邻控制体之间就可以根据上述定律构建耦合关系。求解时,软件先根据初始化时的数值进行耦合计算,物理量在满足上述定律的前提下逐个传递,当传递至边界时,由于边界上的条件已知,就可以校验传递过来的数值与已知边界条件之间的误差,如图 15-4 所示。根据误差,软件会依据相应的数值计算方法自动调整初值,再进行新一轮的计算。总的计算轮数也就是软件中的迭代步数。
从计算原理可以获得如下启发: